
BEC Simulation#
The BEC simulation framework comprises a set of simulated devices. These devices offer a platform for developers to explore, test, or add new features to the core libraries of BEC and BEC-Widgets. Additionally, the end-to-end test framework enables the simulation of user behavior at the beamline, facilitating the testing of newly developed features against common user commands. These end-to-end tests encompass various scans, motions, and scenarios, such as requesting a motor to move beyond its limits or simulating system recovery from user interruptions (CTRL-C). Moreover, the framework enables users to develop scripts, GUIs, or data processing tools without requiring access to the physical devices, facilitating faster development cycles.
Architecture#
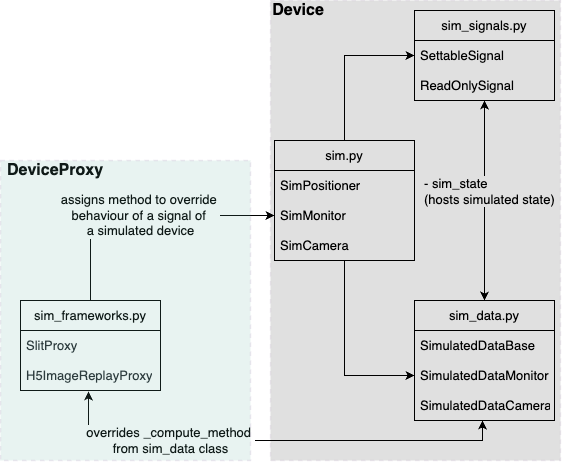
Architecture Diagram:
The BEC simulation currently hosts three main device types: SimMonitor, SimPositioner, and SimCamera. Their state, as well as readback value, can be configured within the simulation_state of the device. Additionally, we provide two examples of DeviceProxies demonstrating how multiple devices can be linked within the simulation to imitate specific scenarios.#
This architecture diagram illustrates the relevant classes for the simulation and their interconnections. To comprehend individual components fully, we recommend reading the following sections with the architecture in mind.
Simulated Devices#
The core of the simulation provides a range of devices that allow the simulation of monitors (SimMonitor), motors (SimPositioner), or cameras (SimCamera). Although these devices are simulated, we inherit from Ophyd , ensuring compliance with the structure prescribed for devices within Ophyd. Each device can host different signals, for which we have created two custom Signals: a SettableSignal for storing configuration signals such as velocity or num_images, with read and write access, and a ReadOnlySignal for read-only signals. The computation logic for the readback value, as well as the storage of all signal states, is housed in sim_data.
For example, the readback of the SimMonitor device can be configured to return values calculated based on a range of models from LMFIT, together with a reference position defined by a motor. For SimCamera, we have implemented two custom readback functions allowing simulation of a multivariate Gaussian or constant readback. Noise can be added to all signals, and we also allow hot, dead, or fluctuating pixels to be added to the readback of SimCamera.
Simulation Frameworks#
To mimic the behavior of a beamline more realistically, we provide an additional device type called DeviceProxy with two examples for SimCamera. The first, H5ImageReplayProxy, allows you to replay data from an existing h5 file. This proxy is configured through the deviceConfig, specifying the h5 file location and the entry with the images composed as an array with dimensions (slice, x, y). The simulation will wrap if your scan exceeds the number of images in the file and play them from the start. Notably, this proxy implements the replay capability within the scope of BEC scans. The second simulation, SlitProxy, allows the linking of single or multiple motors’ positions to be taken into account when computing the readback for SimCamera, e.g., slit widths.
Note
Proxies override the _compute method from the signal of the device they are configured to act upon. They can be enabled or disabled from the command-line interface for simple usage.
Usage#
The simulation framework for each simulated device can be accessed through dev.<devname>.sim. We have implemented three methods and a property to facilitate easy access configuration and configuration of the simulation parameters. These are dev.<devname>.sim.sim_get_models(), dev.<devname>.sim.sim_select_model(), dev.<devname>.sim.sim_show_all(), and dev.<devname>.sim.sim_params. With these functions, you can configure the simulation of your device as needed.
Configuration of simulated devices#
As mentioned earlier, SimMonitor and SimCamera offer different simulation types. To receive a list of strings with all available simulation types for SimMonitor, you can use the code below:
• demo [11/171] ❯❯ dev.bpm4i.sim.sim_get_models()
Out[11]:
['BreitWignerModel',
'ConstantModel',
'DampedHarmonicOscillatorModel',
'DampedOscillatorModel',
'DoniachModel',
'ExponentialGaussianModel',
'ExponentialModel',
'GaussianModel',
'LinearModel',
'LognormalModel',
'LorentzianModel',
'MoffatModel',
'ParabolicModel',
'Pearson4Model',
'Pearson7Model',
'PolynomialModel',
'PowerLawModel',
'PseudoVoigtModel',
'QuadraticModel',
'RectangleModel',
'SineModel',
'SkewedGaussianModel',
'SkewedVoigtModel',
'SplitLorentzianModel',
'StepModel',
'StudentsTModel',
'ThermalDistributionModel',
'VoigtModel']
By default, monitors are initialized with the ConstantModel and a uniform noise pattern. To change this for the device dev.bpm4i to first simulate a Gaussian function and then use Poisson noise, follow the steps below:
• demo [12/171] ❯❯ dev.bpm4i.sim.sim_select_model("GaussianModel")
+------------------------------------------------------------------------------------------------------------------------------------------+
| Currently active model: <lmfit.Model: Model(gaussian)> |
+----------------------------------------------------------+-------------------+-----------------------------------------------------------+
| Parameter | Value | Type |
+----------------------------------------------------------+-------------------+-----------------------------------------------------------+
| amplitude | 100 | <class 'int'> |
| center | 0 | <class 'int'> |
| sigma | 1 | <class 'int'> |
| fwhm | 2.35482 | <class 'float'> |
| height | 39.89423 | <class 'float'> |
| noise | uniform | <enum 'NoiseType'> |
| noise_multiplier | 10 | <class 'int'> |
| ref_motor | samx | <class 'str'> |
+----------------------------------------------------------+-------------------+-----------------------------------------------------------+
• demo [13/171] ❯❯ dev.bpm4i.sim.sim_params = {"noise" : "poisson"}
• demo [14/171] ❯❯ dev.bpm4i.sim.sim_params
Out[14]:
{'amplitude': 100,
'center': 0,
'sigma': 1,
'fwhm': 2.35482,
'height': 39.89423,
'noise': 'poisson',
'noise_multiplier': 10,
'ref_motor': 'samx'}
Note
dev.<devname>.sim.sim_params is a property and by assigning a new dictionary to it, you will not override all parameters but update the current set of parameters stored in the property. It will raise if you are trying to set a key to an irregular value, e.g. non existing model, or in case of a key does not exist in sim_params.
Finally, you can use dev.bpm4i.sim.sim_show_all() to obtain a comprehensive printout of the currently active model, all available methods, and the available models for this device. Similarly, you may configure the SimCamera, which implements only a limited scope of simulation models, as shown below:
• demo [15/171] ❯❯ dev.eiger.sim.sim_get_models()
Out[15]: ['constant', 'gaussian']
Simulation scenarios#
As mentioned earlier, the simulation frameworks enable users to replay certain simulation scenarios easily. The two current examples serve as templates for implementing new scenarios. New implementations should inherit from the abstract class DeviceProxy and implement the _compute method, which overrides the computation method for the given signal. An example config entry for the given scenarios is stored in their docstring. For example, for the class H5ImageReplayProxy:
h5_image_sim:
readoutPriority: baseline
deviceClass: H5ImageReplayProxy
deviceConfig:
eiger:
signal_name: image
file_source: /path/to/h5file.h5
h5_entry: /entry/data
enabled: true
readOnly: false
You will need to adapt file_source and h5_entry to point to an h5 file for the device to work. The device itself becomes available in the client like any other device and can be enabled and disabled on demand. This allows the user to control whether data is to be replayed from the file.